 In the following tutorial animate the spider vehicle which we have assembled from a picture in the previous tutorial.
If you want to follow along you can drag this blueprint into your game.
In the following tutorial animate the spider vehicle which we have assembled from a picture in the previous tutorial.
If you want to follow along you can drag this blueprint into your game.
Creating the poses
First create some walking poses which the assembly will fade between one by one later to walk. Make sure you have assigned a master object in the mo properties of one object. Move objects by dragging them. To test your animation click play animation.

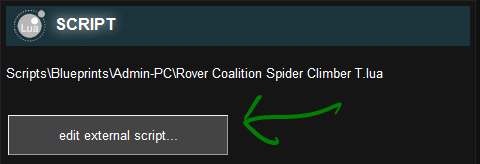
Set up the Lua script
Now lets dive into the scripting. Press edit external script to open the Lua script of the Blueprint.
Set up your Lua script with the Build and Update function like here:
function Blueprint:Build()
-- do this once when the object is created
end
function Blueprint:Update()
--do this every frame (many times a second)
endRegister button inputs
Now setup the joints to make sure they are able to fade to poses later. In addition to that set up some function which get called by the vehicle pilot if he presses the right button.
function Blueprint:Build()
--Do this once when the object is created
--Setup joints
self:JointSet(""):SetAngularSpringPower(2000)
self:JointSet(""):SetAngularFriction(50)
--Setup a variable to check the state of the right button
self.right = false
self.ControlRightPress = function(which)
self.right = true
end
self.ControlRightRelease = function(which)
self.right = false
end
endSetup a pose state
Now we create a table which holds all the information about the pose we added: its name, affected joints, current pose, the count of poses in total and the time to fade from one pose to the next. Make sure the joints you want to change all start with the string you set for joints (here “Leg”).
function Blueprint:Build()
--Do this once when the object is created
--Setup joints
self:JointSet(""):SetAngularSpringPower(2000)
self:JointSet(""):SetAngularFriction(50)
--Setup a variable to check the state of the right button
self.right = false
self.ControlRightPress = function(which)
self.right = true
end
self.ControlRightRelease = function(which)
self.right = false
end
--Put all the information about the pose in a table
self.poseanim = {}
self.poseanim.walkRight = {
name = "Walk Right",
joints = "Leg",
state = 1,
count = 4,
interval = 0.4
}
endIn the update function we check if right button is pressed and then call a function which advances the pose. We define this function next. If no button is pressed all joints of the assembly will fade back to its idle pose.
function Blueprint:Update()
--Do this every frame (many times a second)
--Walk right if the right button is held down
if self.right then
self:advancePose(self.poseanim.walkRight)
else
self:FadeAngularSpringAnglesByPose("", "Idle 1", 0.04)
end
endAdvancing the pose
Finally, to put everything together, we define the advancePose() function which fades from one pose to the next if the assembly is not fading to a pose.
function Blueprint:Build()
--Do this once when the object is created
--Setup joints
self:JointSet(""):SetAngularSpringPower(2000)
self:JointSet(""):SetAngularFriction(50)
--Setup a variable to check the state of the right button
self.right = false
self.ControlRightPress = function(which)
self.right = true
end
self.ControlRightRelease = function(which)
self.right = false
end
--Put all the information about the pose in a table
self.poseanim = {}
self.poseanim.walkRight = {
name = "Walk Right",
joints = "Leg",
state = 1,
count = 4,
interval = 0.4
}
--Advance pose to the next pose
function self:advancePose(anim)
--Get any joint of this group and make sure it exists and finished its pose fade
local joint = self:GetAnyJointByName(anim.joints)
if joint and not joint:GetAngularSpringAngleFadingNow() then
--Advance state counter
anim.state = anim.state + 1
if anim.state > anim.count then
anim.state = 1
end
--Advance to next pose
local pose = anim.name.." "..anim.state
self:FadeAngularSpringAnglesByPose(anim.joints, pose, anim.interval)
end
end
end
function Blueprint:Update()
--Do this every frame (many times a second)
--Walk right if the right button is held down
if self.right then
self:advancePose(self.poseanim.walkRight)
else
self:FadeAngularSpringAnglesByPose("", "Idle 1", 0.04)
end
endAnd that’s it. With this system established it should be fairly easy to add new additional animations to your blueprint. Don’t forget to share your creation in #pp-blueprints.
To improve the gait of this robot further an additional joint connection between the feet and legs can be added. Give it a try!
